
温州皮鞋厂老板上周就一直在问这个。正好昨天和今天早上有空,加上又在雨夜,就写一波。
温州皮鞋厂老板的问题如下:
慢启动:
init_cwnd×2n=cwnd
i
n
i
t
_
c
w
n
d
×
2
n
=
c
w
n
d
增长速率为
2n
2
n
求导=
n×2n−1
n
×
2
n
−
1
. pacing_gain应该等于类似这个东西来算吧
怎么就
2ln2
2
l
n
2
了
其实一开始我也不知道,根本就没有注意过这个问题,能找到的资料也就是tcp_bbr.c中关于bbr_high_gain的注释:
/* We use a high_gain value of 2/ln(2) because it's the smallest pacing gain
* that will allow a smoothly increasing pacing rate that will double each RTT
* and send the same number of packets per RTT that an un-paced, slow-starting
* Reno or CUBIC flow would:
*/
static const int bbr_high_gain = BBR_UNIT * 2885 / 1000 + 1;另外,BBR的paper:
https://queue.acm.org/detail.cfm?id=3022184
这里面也能找到一段论述:
To handle Internet link bandwidths spanning 12 orders of magnitude, Startup implements a binary search for BtlBw by using a gain of 2/ln2 to double the sending rate while delivery rate is increasing. This discovers BtlBw in log2BDP RTTs but creates up to 2BDP excess queue in the process.
除此之外,就再也找不到别的资料了。我自己也很好奇,也跟很多人进行了讨论,甚至包括BBR的作者之一Neal Cardwell,最终以我自己的理解,整理出了这篇文章,希望能帮同样有此疑问的人解惑。
在Startup阶段,BBR的bbr_high_gain同时作用于
PacingRate
P
a
c
i
n
g
R
a
t
e
和
Cwnd
C
w
n
d
两者,两者遵循同样的演化规律,即随着
RTT
R
T
T
轮数而指数级递增:
PacingRate=f1(rounds)=R0×2rounds
P
a
c
i
n
g
R
a
t
e
=
f
1
(
r
o
u
n
d
s
)
=
R
0
×
2
r
o
u
n
d
s
Cwnd=f2(rounds)=init_cwnd×2rounds
C
w
n
d
=
f
2
(
r
o
u
n
d
s
)
=
i
n
i
t
_
c
w
n
d
×
2
r
o
u
n
d
s
因此,在推导bbr_high_gain时,可以沿着两条路分别进行,我们先沿着
PacingRate
P
a
c
i
n
g
R
a
t
e
积分到
Cwnd
C
w
n
d
这条路推导出
Cwnd
C
w
n
d
视角的bbr_high_gain,然后再通过
Cwnd
C
w
n
d
求导到
PacingRate
P
a
c
i
n
g
R
a
t
e
这条路来验算。
假设在第
n
n
个时其
PacingRate
P
a
c
i
n
g
R
a
t
e
是
R0×2n
R
0
×
2
n
,那么在下一个
RTT
R
T
T
,即
n+1
n
+
1
个
RTT
R
T
T
时,它的
PacingRate
P
a
c
i
n
g
R
a
t
e
就会变成
R0×2n+1
R
0
×
2
n
+
1
,多了
2n
2
n
个
R0
R
0
,在Startup阶段,
Cwnd
C
w
n
d
也遵循同样的演化规律。
为了推导简单,我们将设
R0
R
0
,
InitCwnd
I
n
i
t
C
w
n
d
,
RTT
R
T
T
均为
1
1
来归一化,同时用自变量表示以一个
RTT
R
T
T
为单位的轮数,上面的式子可以写成:
PacingRate=f1(x)=2x
P
a
c
i
n
g
R
a
t
e
=
f
1
(
x
)
=
2
x
Cwnd=f2(x)=2x
C
w
n
d
=
f
2
(
x
)
=
2
x
而我们知道,
BDP
B
D
P
是
PacingRate
P
a
c
i
n
g
R
a
t
e
在时间上的积分(忽略常数C)。根据我们的假设,我们是按
RTT
R
T
T
轮数来计数的,所以一个
RTT
R
T
T
单位内的
BDP
B
D
P
就是一个关于
PacingRate
P
a
c
i
n
g
R
a
t
e
的定积分:


按照牛顿-莱布尼兹定理则有:
BDPlastrtt=F(x)|xx−1=∫xx−12xdx=2x2ln2
B
D
P
l
a
s
t
r
t
t
=
F
(
x
)
|
x
−
1
x
=
∫
x
−
1
x
2
x
d
x
=
2
x
2
ln
2
抽掉
BDP
B
D
P
中的时间维度,在数值上它的意义就是
Cwnd
C
w
n
d
。
设
G
G
为增益系数,根据间隔一个时其
Cwnd
C
w
n
d
的关系,则有:
F(x)|xx−1=G×f2(x−2)
F
(
x
)
|
x
−
1
x
=
G
×
f
2
(
x
−
2
)
化简可以得到:
2x2ln2=G×2x4
2
x
2
ln
2
=
G
×
2
x
4
所以,我们就得到了
G
G
:
接下来,我们来沿着从
Cwnd
C
w
n
d
到
PacingRate
P
a
c
i
n
g
R
a
t
e
这条路来再走一遍,看看求出的增益系数是不是同一个值。
我们知道,发送量的变化率其实就是发送速率,因此对
Cwnd
C
w
n
d
关于时间求导,就可以得到速率:
g(x)=f2′(x)=(2x)′=2xln2
g
(
x
)
=
f
2
′
(
x
)
=
(
2
x
)
′
=
2
x
ln
2
设
α
α
为
PacingRate
P
a
c
i
n
g
R
a
t
e
的增益系数,则有:
g(x+1)=α×g(x)=α×2xln2
g
(
x
+
1
)
=
α
×
g
(
x
)
=
α
×
2
x
ln
2
经过
α
α
演化的
PacingRate
P
a
c
i
n
g
R
a
t
e
恰好就是
f1(x+1)
f
1
(
x
+
1
)
的数值:
f1(x+1)=α×g(x)=2x+1=α×2xln2
f
1
(
x
+
1
)
=
α
×
g
(
x
)
=
2
x
+
1
=
α
×
2
x
ln
2
所以,我们可以求出
α
α
的数值:
α=2ln2
α
=
2
ln
2
可以看出,这里的
PacingRate
P
a
c
i
n
g
R
a
t
e
的增益和前面的
Cwnd
C
w
n
d
增益在数值上是完全一致的,这也就是TCP BBR中的那个魔数
2ln2
2
ln
2
的由来。
如果你足够细心,你会发现上面的推导中有一个破绽。比如,既然
f1(x)=f2(x)
f
1
(
x
)
=
f
2
(
x
)
,而
g(x)
g
(
x
)
又由
f1(x)
f
1
(
x
)
求导产生,
g(x)
g
(
x
)
和
f2(x)
f
2
(
x
)
均表示
PacingRate
P
a
c
i
n
g
R
a
t
e
时,显然而然的是:
g(x)≠f2(x)
g
(
x
)
≠
f
2
(
x
)
!!
其实,函数
f1
f
1
和
f2
f
2
之所以这么写是因为它们在离散的
RTT
R
T
T
上表现得确实如此,但在实际中,速率计算,
Cwnd
C
w
n
d
计算并非总是由平滑均匀的ACK事件来触发的,所以说就必须用一条光滑的曲线来尽量拟合离散的点,因此,上面的
f1(x)
f
1
(
x
)
,
f2(x)
f
2
(
x
)
本身就不是光滑曲线,它们和
g(x)
g
(
x
)
本身就不是同一条曲线。
实际上,
f1(x)
f
1
(
x
)
和
f2(x)
f
2
(
x
)
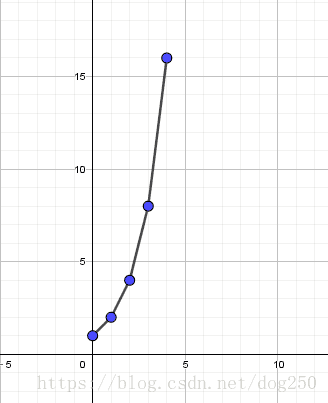
表示的均是折线,所要做的正是用光滑的曲线去拟合折线上那些离散的转折点,所以说,只能用增益系数代入去解方程,而不是直接让两个函数相等。
f1
f
1
和
f2
f
2
的图像类似下面这样:
我们再把代表
BDP
B
D
P
的平滑拟合曲线
F(x)
F
(
x
)
以及代表
PacingRate
P
a
c
i
n
g
R
a
t
e
的平滑拟合曲线
g(x)
g
(
x
)
画到同一个坐标系中:
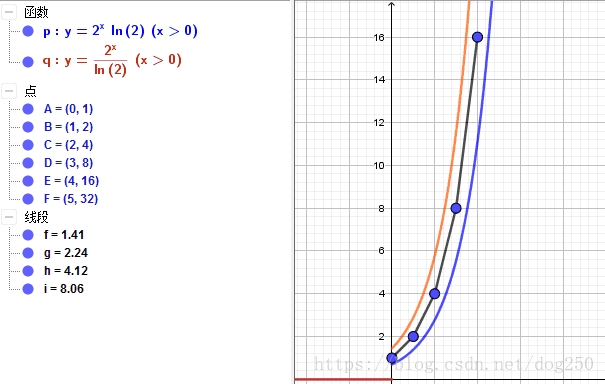
可以看得出,它们是3样不同的曲线。
不过,看起来
F(x)
F
(
x
)
和
g(x)
g
(
x
)
对离散的
f1(x)
f
1
(
x
)
和
f2(x)
f
2
(
x
)
拟合得并不是很理想,那为什么不直接用
f(x)=2x
f
(
x
)
=
2
x
来拟合呢?它可是能完美拟合的吧:

或者,我们可以用二项式去拟合,用级数…
然而这些都不行。为什么呢?因为要考虑到计算,这里并不是在解一道数学题,而是要求出一个确定的常数作为增益系数
G
G
,注意,是确定的常数。如果不通过积分或者求导的方式引入一个因子,单纯的
f(x)=2x
f
(
x
)
=
2
x
是无法得到一个确定的常数的。
这种方法,我们感到似曾相识,TCP的拥塞控制算法,从BIC到CUBIC就是采用了这种光滑的三次曲线拟合BIC二分折线的方法,其中的那些参数也可以用类似的方法求解。
除此之外,以上推导中,下面的关系是不存在的:
f1(x+1)=α×f1(x)
f
1
(
x
+
1
)
=
α
×
f
1
(
x
)
f2(x+1)=α×f2(x)
f
2
(
x
+
1
)
=
α
×
f
2
(
x
)
为什么?因为
f1(x)
f
1
(
x
)
和
f2(x)
f
2
(
x
)
上的点是离散的,非连续函数在无定义的域上求值没有意义。然而ACK的到达并非以RTT为单位准点的,更有可能遭遇ACK丢失,ACK聚集等无法预知的时间,因此ACK到达是任意的,所以就必须用光滑的曲线来拟合这些离散的点,从而达到比较平滑的增益效果。
简单点说,增益系数
G
G
的结果是针对光滑的拟合曲线而言的,即针对以及
F(x)
F
(
x
)
的,而不是针对
f1(x)
f
1
(
x
)
和
f2(x)
f
2
(
x
)
的。
原文链接: https://blog.csdn.net/dog250/article/details/80660091
欢迎关注
微信关注下方公众号,第一时间获取干货硬货;公众号内回复【pdf】免费获取数百本计算机经典书籍;
也有高质量的技术群,里面有嵌入式、搜广推等BAT大佬

原创文章受到原创版权保护。转载请注明出处:https://www.ccppcoding.com/archives/406896
非原创文章文中已经注明原地址,如有侵权,联系删除
关注公众号【高性能架构探索】,第一时间获取最新文章
转载文章受原作者版权保护。转载请注明原作者出处!