
翻译:http://ceres-solver.org/nnls_tutorial.html
参考:https://blog.csdn.net/wzheng92/article/details/79700911?spm=1001.2014.3001.5501
1.介绍
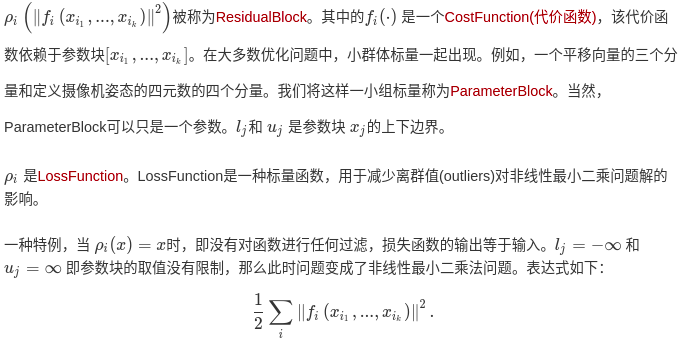
Ceres 可以解决以下形式的边界约束鲁棒化非线性最小二乘问题
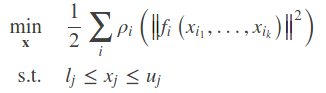


"非线性"是指代价函数为非线性函数。
这一表达式在工程和科学领域有非常广泛的应用。比如统计学中的曲线拟合,或者在计算机视觉中依据图像进行三维模型的构建等等。
2.Hello World!
首先,考虑寻找函数的最小值的问题。

这是一个微不足道的问题,其最小值位于x = 10,但这是一个很好的起点,可以说明使用Ceres解决问题的基础知识。
第一步是编写一个函子来评估这个函数f(x) = 10 - x
// 构建代价函数,重载()符号
struct CostFunctor {
template <typename T>
bool operator()(const T* const x, T* residual) const {
residual[0] = 10.0 - x[0];
return true;
}
};
这里需要注意的重要一点是,operator()是一个模板化方法,它假定其所有输入和输出都是某种类型T。这里使用模板允许Ceres调用CostFunctor::operator(),当只需要残差值时使用T=double,当需要雅可比矩阵时使用特殊类型T=Jet。
一旦我们有了计算残差函数的方法,现在是时候用它来构造一个非线性最小二乘问题并让Ceres来解决它了。
完整的代码在ceres-solver-1.14.0/examples/helloworld.cc中
#include "ceres/ceres.h"
#include "glog/logging.h"
using ceres::AutoDiffCostFunction;
using ceres::CostFunction;
using ceres::Problem;
using ceres::Solver;
using ceres::Solve;
// A templated cost functor that implements the residual r = 10 -
// x. The method operator() is templated so that we can then use an
// automatic differentiation wrapper around it to generate its
// derivatives.
// 第一部分:构建代价函数,重载()符号,仿函数的小技巧
struct CostFunctor {
template <typename T> bool operator()(const T* const x, T* residual) const {
residual[0] = 10.0 - x[0];
return true;
}
};
int main(int argc, char** argv) {
google::InitGoogleLogging(argv[0]);
// The variable to solve for with its initial value. It will be
// mutated in place by the solver.
// 设置寻优参数x的初始值,为0.5
double x = 0.5;
const double initial_x = x;
// Build the problem.
Problem problem;
// Set up the only cost function (also known as residual). This uses
// auto-differentiation to obtain the derivative (jacobian).
// 第二部分:构建寻优问题
CostFunction* cost_function =
// 使用自动求导,将之前的代价函数结构体传入,第一个1是输出维度,即残差的维度,第二个1是输入维度,即待寻优参数x的维度。
new AutoDiffCostFunction<CostFunctor, 1, 1>(new CostFunctor);
// 向问题中添加残差项,本问题比较简单,添加一个就行。
problem.AddResidualBlock(cost_function, NULL, &x);
// Run the solver!
// 第三部分: 配置并运行求解器
Solver::Options options;
options.minimizer_progress_to_stdout = true;
// 注意:下面这两行是新加的,因为默认编译的ceres不支持SPARSE_NORMAL_CHOLESKY
options.linear_solver_type = ceres::DENSE_QR;
// options.sparse_linear_algebra_library_type = ceres::NO_SPARSE;
Solver::Summary summary; // 优化信息
Solve(options, &problem, &summary);// 求解!!!
std::cout << summary.BriefReport() << "n"; // 输出优化的简要信息
std::cout << "initial x : " << initial_x << ", "
<< "result x : " << x << "n";
return 0;
}
运行结果
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time
0 4.512500e+01 0.00e+00 9.50e+00 0.00e+00 0.00e+00 1.00e+04 0 2.84e-05 2.52e-04
1 4.511598e-07 4.51e+01 9.50e-04 9.50e+00 1.00e+00 3.00e+04 1 3.36e-05 3.15e-04
2 5.012552e-16 4.51e-07 3.17e-08 9.50e-04 1.00e+00 9.00e+04 1 2.11e-05 3.62e-04
trust_region_minimizer.cc:687 Terminating: Parameter tolerance reached. Relative step_norm: 3.166209e-09 <= 1.000000e-08.
Ceres Solver Report: Iterations: 3, Initial cost: 4.512500e+01, Final cost: 5.012552e-16, Termination: CONVERGENCE
initial x : 0.5, result x : 10
初始值为0.5,最终通过3次循环之后到达最优解10。其实本例是一个线性问题,因为
f(x)=10−x是一个线性函数,但是Ceres仍然可以应用。对于Ceres解非线性应用的流程和具体配置将在后续的教程中给出。
代码解析: 1.构建代价函数
使用了仿函数,即在CostFunctor结构体内,对()操作符进行了重载,这样使该结构体的一个实例就能具有类似一个函数的性质,在代码编写过程中就能当做一个函数一样来使用。
仿函数: https://www.cnblogs.com/vivian187/p/15329482.html
代价函数:
代码解析: 2.配置问题并求解问题
注意:相对于源代码,这里新添加了
options.linear_solver_type = ceres::DENSE_QR;
原因:因为ceres-solver-1.14.0的CMakeLists.txt中的默认配置,导致SuiteSparse, CXSparse等不可用。因此运行时会出现如下问题
solver.cc:531 Terminating: Can't use SPARSE_NORMAL_CHOLESKY with SUITESPARSE because SuiteSparse was not enabled when Ceres was built.
线性求解器的类型,用于计算Levenberg-Marquardt算法每次迭代中线性最小二乘问题的解。 如果编译Ceres时加入了SuiteSparse或CXSparse或Eigen的稀疏Cholesky分解选项,则默认为SPARSE_NORMAL_CHOLESKY,否则为DENSE_QR。
DENSE_QR: 对于较小的问题(几百个参数和几千个残差),相对稠密的Jacobians,DENSE_QR 是一个选择。
DENSE_NORMAL_CHOLESKY & SPARSE_NORMAL_CHOLESKY: 大型非线性最小二乘问题通常是稀疏的。在这种情况下,使用稠密的QR分解是低效的。
原文链接: https://www.cnblogs.com/vivian187/p/15325294.html
欢迎关注
微信关注下方公众号,第一时间获取干货硬货;公众号内回复【pdf】免费获取数百本计算机经典书籍;
也有高质量的技术群,里面有嵌入式、搜广推等BAT大佬

原创文章受到原创版权保护。转载请注明出处:https://www.ccppcoding.com/archives/396997
非原创文章文中已经注明原地址,如有侵权,联系删除
关注公众号【高性能架构探索】,第一时间获取最新文章
转载文章受原作者版权保护。转载请注明原作者出处!