
请你来说一下map和set有什么区别,分别又是怎么实现的?
map和set都是C++的关联容器,其底层实现都是红黑树(RB-Tree)。由于 map 和set所开放的各种操作接口,RB-tree 也都提供了,所以几乎所有的 map 和set的操作行为,都只是转调 RB-tree 的操作行为。
map 和 set 区别:
(1)map中的元素是key-value(关键字—值):关键字起到索引的作用,值则表示与索引相关联的数据;Set与之相对就是关键字的简单集合,set中每个元素只包含一个关键字。
(2)set的迭代器是const的,不允许修改元素的值;map允许修改value,但不允许修改key。其原因是因为map和set是根据关键字排序来保证其有序性的,如果允许修改key的话,那么首先需要删除该键,然后调节平衡,再插入修改后的键值,调节平衡,如此一来,严重破坏了map和set的结构,导致iterator失效,不知道应该指向改变前的位置,还是指向改变后的位置。所以STL中将set的迭代器设置成const,不允许修改迭代器的值;而map的迭代器则不允许修改key值,允许修改value值。
(3)map支持下标操作,set不支持下标操作。map可以用key做下标,map的下标运算符[ ]将关键码作为下标去执行查找,如果关键码不存在,则插入一个具有该关键码和mapped_type类型默认值的元素至map中,因此下标运算符[ ]在map应用中需要慎用,const_map不能用,只希望确定某一个关键值是否存在而不希望插入元素时也不应该使用,mapped_type类型没有默认值也不应该使用。如果find能解决需要,尽可能用find。
请你说说STL中map与unordered_map
1、Map映射,map 的所有元素都是 pair,同时拥有实值(value)和键值(key)。pair 的第一元素被视为键值,第二元素被视为实值。所有元素都会根据元素的键值自动被排序。不允许键值重复。
底层实现:红黑树
适用场景:有序键值对不重复映射
2、Multimap
多重映射。multimap 的所有元素都是 pair,同时拥有实值(value)和键值(key)。pair 的第一元素被视为键值,第二元素被视为实值。所有元素都会根据元素的键值自动被排序。允许键值重复。
底层实现:红黑树
适用场景:有序键值对可重复映射
请你讲讲STL有什么基本组成
STL(Standard Template Library,标准模板库)主要由以下几部分组成:
1.容器2. 算法3. 迭代器4. 仿函数5. 适配器6. 空间配置器
他们之间的关系:
容器通过空间配置器取得数据存储空间,算法通过迭代器存储容器中的内容,仿函数可以协助算法完成不同的策略变化,适配器可以修饰仿函数。
具体内容参考:https://www.cnblogs.com/john1015/p/13168813.html
请你来介绍一下STL的分配器allocator
allocator: STL的分配器,用于封装STL容器在内存管理上的底层细节。
在c++中,其内存配置和释放如下:
new运算分两个阶段:
(1)调用::operator new配置内存;
(2)调用对象构造函数构造对象内容。
delete运算分两个阶段:
(1)调用对象析构函数;
(2)调用::operator delete释放内存。
为了精密分工,STL allocator将两个阶段操作区分开来:
内存配置由alloc::allocate()负责,内存释放由alloc::deallocate()负责;
对象构造由::construct()负责,对象析构由::destroy()负责。
同时为了提升内存管理的效率,减少申请小内存造成的内存碎片问题,SGI STL采用了两级配置器,当分配的空间大小超过128B时,会使用第一级空间配置器;当分配的空间大小小于128B时,将使用第二级空间配置器。第一级空间配置器直接使用malloc()、realloc()、free()函数进行内存空间的分配和释放,而第二级空间配置器采用了内存池技术,通过空闲链表来管理内存。
请你来说一下STL中迭代器的作用,有指针为何还要迭代器
1、迭代器
Iterator(迭代器)模式又称Cursor(游标)模式,用于提供一种方法顺序访问一个聚合对象中各个元素, 而又不需暴露该对象的内部表示。或者这样说可能更容易理解:Iterator模式是运用于聚合对象的一种模式,通过运用该模式,使得我们可以在不知道对象内部表示的情况下,按照一定顺序(由iterator提供的方法)访问聚合对象中的各个元素。
由于Iterator模式的以上特性:与聚合对象耦合,在一定程度上限制了它的广泛运用,一般仅用于底层聚合支持类,如STL的list、vector、stack等容器类及ostream_iterator等扩展iterator。
2、迭代器和指针的区别
迭代器不是指针,是类模板,表现的像指针。他只是模拟了指针的一些功能,通过重载了指针的一些操作符,->、*、++、--等。迭代器封装了指针,是一个“可遍历STL( Standard Template Library)容器内全部或部分元素”的对象, 本质是封装了原生指针,是指针概念的一种提升(lift),提供了比指针更高级的行为,相当于一种智能指针,他可以根据不同类型的数据结构来实现不同的++,--等操作。
注:迭代器返回的是对象引用而不是对象的值,所以cout只能输出迭代器使用*取值后的值而不能直接输出其自身。
3、迭代器产生原因
Iterator类的访问方式就是把不同集合类的访问逻辑抽象出来,使得不用暴露集合内部的结构而达到循环遍历集合的效果。
请你说一说STL迭代器是怎么删除元素的呢
请你回答一下STL里resize和reserve的区别
resize():
reserve():
请你说一说vector和list的区别,应用,越详细越好
1、概念:
1)Vector
定义:连续存储的容器,动态数组,在堆上分配空间
底层实现:数组
两倍容量增长:
vector 增加(插入)新元素时,如果未超过当时的容量,则还有剩余空间,那么直接添加到最后(插入指定位置),然后调整迭代器。
如果没有剩余空间了,则会重新配置原有元素个数的两倍空间,然后将原空间元素通过复制的方式初始化新空间,再向新空间增加元素,最后析构并释放原空间,之前的迭代器会失效。
性能:
- 访问:O(1)
- 插入:在最后插入(空间够):很快
- 在最后插入(空间不够):需要内存申请和释放,以及对之前数据进行拷贝。
- 在中间插入(空间够):内存拷贝
- 在中间插入(空间不够):需要内存申请和释放,以及对之前数据进行拷贝。
- 删除:在最后删除:很快
- 在中间删除:内存拷贝
- 适用场景:经常随机访问,且不经常对非尾节点进行插入删除。
2)List
定义:动态链表,在堆上分配空间,每插入一个元数都会分配空间,每删除一个元素都会释放空间。
底层实现:双向链表
性能:
- 访问:随机访问性能很差,只能快速访问头尾节点。
- 插入:很快,一般是常数开销
- 删除:很快,一般是常数开销
- 适用场景:经常插入删除大量数据
2、区别
1)vector底层实现是数组;list是双向 链表。
2)vector支持随机访问,list不支持。
3)vector是顺序内存,list不是。
4)vector在中间节点进行插入删除会导致内存拷贝,list不会。
5)vector一次性分配好内存,不够时才进行2倍扩容;list每次插入新节点都会进行内存申请。
6)vector随机访问性能好,插入删除性能差;list随机访问性能差,插入删除性能好。
3、应用
vector拥有一段连续的内存空间,因此支持随机访问,如果需要高效的随机访问,而不在乎插入和删除的效率,使用vector。
list拥有一段不连续的内存空间,如果需要高效的插入和删除,而不关心随机访问,则应使用list。
请你说一说epoll原理
——网络编程范畴
epoll:
epoll是Linux内核为处理大批量文件描述符而作了改进的poll,是Linux下多路复用IO接口select/poll的增强版本,它能显著提高程序在大量并发连接中只有少量活跃的情况下的系统CPU利用率。——百度百科
调用顺序:
int epoll_create(int size);
int epoll_ctl(int epfd, int op, int fd, struct epoll_event *event);
int epoll_wait(int epfd, struct epoll_event *events,int maxevents, int timeout);
首先创建一个epoll对象,然后使用epoll_ctl对这个对象进行操作,把需要监控的描述添加进去,这些描述如将会以epoll_event结构体的形式组成一颗红黑树,接着阻塞在epoll_wait,进入大循环,当某个fd(软磁盘)上有事件发生时,内核将会把其对应的结构体放入到一个链表中,返回有事件发生的链表。
请你说说select,epoll的区别,原理,性能,限制都说一说
1)IO多路复用
IO复用模型在阻塞IO模型上多了一个select函数,select函数有一个参数是文件描述符集合,意思就是对这些的文件描述符进行循环监听,当某个文件描述符就绪的时候,就对这个文件描述符进行处理。
这种IO模型是属于阻塞的IO。但是由于它可以对多个文件描述符进行阻塞监听,所以它的效率比阻塞IO模型高效。
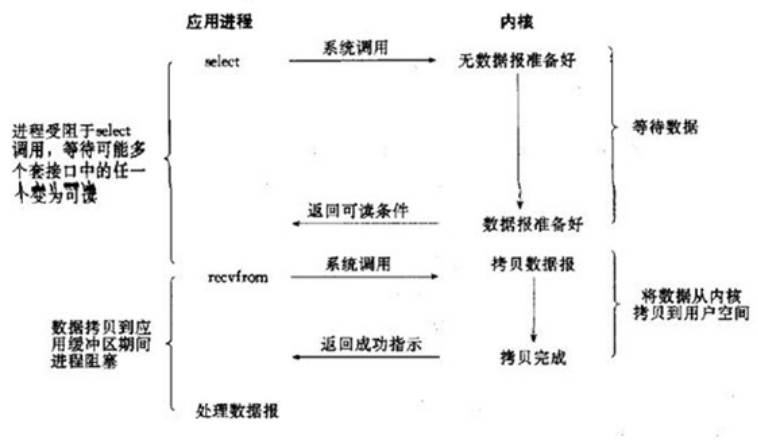

IO多路复用就是我们说的select,poll,epoll。select/epoll的好处就在于单个process就可以同时处理多个网络连接的IO。它的基本原理就是select,poll,epoll这个function会不断的轮询所负责的所有socket,当某个socket有数据到达了,就通知用户进程。
当用户进程调用了select,那么整个进程会被block,而同时,kernel会“监视”所有select负责的socket,当任何一个socket中的数据准备好了,select就会返回。这个时候用户进程再调用read操作,将数据从kernel拷贝到用户进程。
所以,I/O 多路复用的特点是通过一种机制一个进程能同时等待多个文件描述符,而这些文件描述符(套接字描述符)其中的任意一个进入读就绪状态,select()函数就可以返回。
I/O多路复用和阻塞I/O其实并没有太大的不同,事实上,还更差一些。因为这里需要使用两个system call (select 和 recvfrom),而blocking IO只调用了一个system call (recvfrom)。但是,用select的优势在于它可以同时处理多个connection。
所以,如果处理的连接数不是很高的话,使用select/epoll的web server不一定比使用multi-threading + blocking IO的web server性能更好,可能延迟还更大。select/epoll的优势并不是对于单个连接能处理得更快,而是在于能处理更多的连接。)
在IO multiplexing Model中,实际中,对于每一个socket,一般都设置成为non-blocking,但是,如上图所示,整个用户的process其实是一直被block的。只不过process是被select这个函数block,而不是被socket IO给block。
2、select
select:是最初解决IO阻塞问题的方法。用结构体fd_set来告诉内核监听多个文件描述符,该结构体被称为描述符集。由数组来维持哪些描述符被置位了。对结构体的操作封装在三个宏定义中。通过轮寻来查找是否有描述符要被处理。
存在的问题:
1. 内置数组的形式使得select的最大文件数受限与FD_SIZE;
2. 每次调用select前都要重新初始化描述符集,将fd从用户态拷贝到内核态,每次调用select后,都需要将fd从内核态拷贝到用户态;
3. 轮寻排查当文件描述符个数很多时,效率很低;
3、poll
poll:通过一个可变长度的数组解决了select文件描述符受限的问题。数组中元素是结构体,该结构体保存描述符的信息,每增加一个文件描述符就向数组中加入一个结构体,结构体只需要拷贝一次到内核态。poll解决了select重复初始化的问题。轮寻排查的问题未解决。
4、epoll
epoll:轮寻排查所有文件描述符的效率不高,使服务器并发能力受限。因此,epoll采用只返回状态发生变化的文件描述符,便解决了轮寻的瓶颈。
epoll对文件描述符的操作有两种模式:LT(level trigger)和ET(edge trigger)。LT模式是默认模式
1. LT模式
LT(level triggered)是缺省的工作方式,并且同时支持block和no-block socket.在这种做法中,内核告诉你一个文件描述符是否就绪了,然后你可以对这个就绪的fd进行IO操作。如果你不作任何操作,内核还是会继续通知你的。
2. ET模式
ET(edge-triggered)是高速工作方式,只支持no-block socket。在这种模式下,当描述符从未就绪变为就绪时,内核通过epoll告诉你。然后它会假设你知道文件描述符已经就绪,并且不会再为那个文件描述符发送更多的就绪通知,直到你做了某些操作导致那个文件描述符不再为就绪状态了(比如,你在发送,接收或者接收请求,或者发送接收的数据少于一定量时导致了一个EWOULDBLOCK 错误)。但是请注意,如果一直不对这个fd作IO操作(从而导致它再次变成未就绪),内核不会发送更多的通知(only once)
LT模式:当epoll_wait检测到描述符事件发生并将此事件通知应用程序,应用程序可以不立即处理该事件。下次调用epoll_wait时,会再次响应应用程序并通知此事件。
ET模式:当epoll_wait检测到描述符事件发生并将此事件通知应用程序,应用程序必须立即处理该事件。如果不处理,下次调用epoll_wait时,不会再次响应应用程序并通知此事件。
原文链接:https://www.nowcoder.com/tutorial/93/7047559bae6c461582560f58175faa45
原文链接: https://www.cnblogs.com/john1015/p/13169990.html
欢迎关注
微信关注下方公众号,第一时间获取干货硬货;公众号内回复【pdf】免费获取数百本计算机经典书籍;
也有高质量的技术群,里面有嵌入式、搜广推等BAT大佬

原创文章受到原创版权保护。转载请注明出处:https://www.ccppcoding.com/archives/357451
非原创文章文中已经注明原地址,如有侵权,联系删除
关注公众号【高性能架构探索】,第一时间获取最新文章
转载文章受原作者版权保护。转载请注明原作者出处!