
(1)角点检测的核心思想:
使用一个固定窗口在图像上进行任意方向上的滑动,比较滑动前与滑动后两种情况,窗口中的像素灰度变化程度,如果存在任意方向上的滑动,都有着较大灰度变化,那么我们可以认为该窗口中存在角点。
(2)灰度变化描述
当窗口发生[u,v]移动时,那么滑动前与滑动后对应的窗口中的像素点灰度变化描述如下:
E(u,v)=∑(x,y)€Ww(x,y)[I(x+u,y+v)−I(x,y)]2
参数解释:
[u,v]是窗口W的偏移量;
(x,y)是窗口W所对应的像素坐标位置,窗口有多大,就有多少个位置; I(x,y)是像素坐标位置(x,y)的图像灰度值; I(x+u,y+v)是像素坐标位置(x+u,y+v)的图像灰度值; w(x,y)是窗口函数,最简单情形就是窗口W内的所有像素所对应的w权重系数均为1.但有时候,我们会将w(x,y)函数设置为以窗口W中心为原点的二元正太分布。如果窗口W中心点是角点时,移动前与移动后,
该点在灰度变化贡献最大;而离窗口W中心(角点)较远的点,这些点的灰度变化几近平缓,这些点的权重系数,可以设定小值,以示该点对灰度变化贡献较小,那么我们自然而然想到使用二元高斯函数来表示窗口函数;
上述是Moravec角点检测算法,该算法是基于相邻像素之间的欧氏距离度量灰度变化量,缺点:不具有旋转不变性(同一张图片旋转一定角度后,检测到的角点不同),给实际工程应用带来不便。
针对上述问题:Harris运用泰勒公式做出改进,说不明白,上图如下:
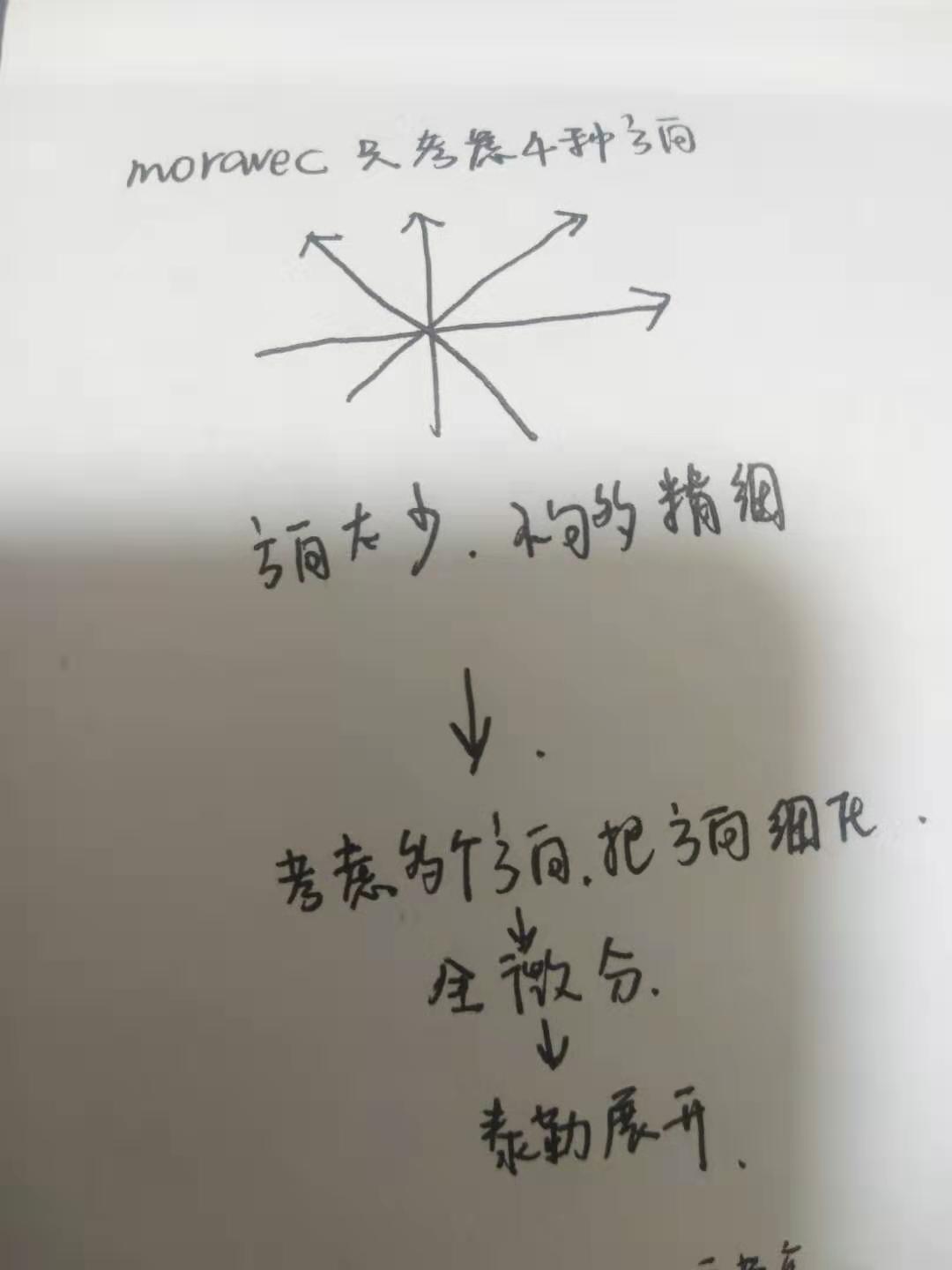

至于算法的推导,可参考:https://www.cnblogs.com/zyly/p/9508131.html#_label5_0;
算法实现:
main.cpp
#include "iostream" #include "opencv2/core.hpp" #include "opencv2/highgui.hpp" #include "my_harris.h" using namespace cv; using namespace std; int main() { my_Harris Harris; Mat img = imread("D:\qtproject\img\4.jpg"); //imshow("img",img); //waitKey(0); /*0.图像预处理之灰度化RGB2GRAY*/ int cols = img.cols; int rows = img.rows; Mat img_gray = Mat(rows,cols,CV_8UC1,Scalar(0)); Harris.RGB2GRAY(img,img_gray); /*1.计算图像在x,y方向的梯度*/ Mat gx_img = Mat(rows,cols,CV_8UC1,Scalar(0)); Mat gy_img = Mat(rows,cols,CV_8UC1,Scalar(0)); Harris.IMG_GRAD(img_gray,gx_img,gy_img); /*2.计算图像在两个方向梯度的乘积*/ Mat gx_p = Mat(rows,cols,CV_8UC1,Scalar(0)); Mat gy_p = Mat(rows,cols,CV_8UC1,Scalar(0)); Mat gxy = Mat(rows,cols,CV_8UC1,Scalar(0)); Harris.GRAD_MULTI(gx_img,gy_img,gx_p,gy_p,gxy); /*3.使用高斯函数加权*/ Mat A = Mat(rows,cols,CV_8UC1,Scalar(0)); Mat B = Mat(rows,cols,CV_8UC1,Scalar(0)); Mat C = Mat(rows,cols,CV_8UC1,Scalar(0)); Harris.GAUSS_WEI(gx_p,gy_p,gxy,A,B,C); /*4.计算每个像素点的harris响应值*/ Mat R = Mat(rows,cols,CV_8UC1,Scalar(0)); Harris.GET_RESPONSE(A,B,C,R); /*5.过滤大于某一阈值t的R值*/ Mat CORNER = Mat(rows,cols,CV_8UC1,Scalar(0)); Harris.FILTER_THRESH(R,img,CORNER); return 0; }
my_harris.cpp
#include "my_harris.h" #define pi 3.14 my_Harris::my_Harris() { } void my_Harris::RGB2GRAY(Mat rgb_img, Mat &gray_img) { Mat img_src = rgb_img.clone(); int rows = img_src.rows; int cols = img_src.cols; Mat img_gray = Mat(rows,cols,CV_8UC1,Scalar(0)); for(int i = 0; i < rows; i++) { for(int j = 0; j<cols; j++) { img_gray.at<uchar>(i,j) = (0.1*img_src.at<Vec3b>(i,j)[0])+(0.6*img_src.at<Vec3b>(i,j)[1])+(0.3*img_src.at<Vec3b>(i,j)[2]);//粗略参数 } } gray_img = img_gray; } void my_Harris::IMG_GRAD(Mat img, Mat &x_grad, Mat &y_grad) { Mat img_src = img.clone(); int rows = img_src.rows; int cols = img_src.cols; Mat x_g = Mat(rows,cols,CV_8UC1,Scalar(0)); Mat y_g = Mat(rows,cols,CV_8UC1,Scalar(0)); for(int i = 1; i < rows-1; i++) { for(int j = 1; j < cols -1; j++) {
//使用sobel算子求梯度 x_g.at<uchar>(i,j) = abs((img_src.at<uchar>(i+1,j-1) - img_src.at<uchar>(i-1,j-1))+ 2*(img_src.at<uchar>(i+1,j) - img_src.at<uchar>(i-1,j)) + (img_src.at<uchar>(i+1,j+1) - img_src.at<uchar>(i-1,j+1)))/3; y_g.at<uchar>(i,j) = abs((img_src.at<uchar>(i-1,j+1) - img_src.at<uchar>(i-1,j-1))+2*(img_src.at<uchar>(i,j+1) - img_src.at<uchar>(i,j-1)) + (img_src.at<uchar>(i+1,j+1) - img_src.at<uchar>(i+1,j-1)))/3; } } x_grad = x_g; y_grad = y_g; } void my_Harris::GRAD_MULTI(Mat x_grad, Mat y_grad, Mat &p_x, Mat &p_y, Mat &p_xy) { Mat x_g = x_grad.clone(); Mat y_g = y_grad.clone(); int rows = x_g.rows; int cols = x_g.cols; Mat px = Mat(rows,cols,CV_8UC1,Scalar(0)); Mat py = Mat(rows,cols,CV_8UC1,Scalar(0)); Mat pxy = Mat(rows,cols,CV_8UC1,Scalar(0)); for(int i = 0; i < rows; i++) { for(int j = 0; j < cols; j++) { px.at<uchar>(i,j) = x_g.at<uchar>(i,j)*x_g.at<uchar>(i,j); py.at<uchar>(i,j) = y_g.at<uchar>(i,j)*y_g.at<uchar>(i,j); pxy.at<uchar>(i,j) = x_g.at<uchar>(i,j)*y_g.at<uchar>(i,j); } } p_x = px; p_y = py; p_xy = pxy; } void my_Harris::GAUSS_WEI(Mat p_x, Mat p_y, Mat p_xy, Mat &A, Mat &B, Mat &C) { Mat Ix = p_x.clone(); Mat Iy = p_y.clone(); Mat Ixy = p_xy.clone(); int rows = Ix.rows; int cols = Ix.cols; Mat g_Ix = Mat(rows,cols,CV_8UC1,Scalar(0)); Mat g_Iy = Mat(rows,cols,CV_8UC1,Scalar(0)); Mat g_Ixy = Mat(rows,cols,CV_8UC1,Scalar(0)); int k = 3; Mat gauss_plate = Mat(k,k,CV_8UC1,Scalar(0)); //GET_GAUSS(3,0.5, gauss_plate); g_Ix = GAUSS_PRO(Ix); g_Iy = GAUSS_PRO(Iy); g_Ixy = GAUSS_PRO(Ixy); A = g_Ix; B = g_Iy; C = g_Ixy; } Mat my_Harris::GAUSS_PRO(Mat g) { Mat Ix = g.clone(); float gauss_plate[3][3]={0.0113437, 0.0838195, 0.0113437, 0.0838195, 0.619347, 0.0838195,0.0113437,0.0838195,0.0113437}; int rows = Ix.rows; int cols = Ix.cols; Mat g_f = Mat(rows,cols,CV_8UC1,Scalar(0)); for(int i = 1; i < rows-1; i++) { for(int j = 1; j < cols-1; j++) { g_f.at<uchar>(i,j) = Ix.at<uchar>(i-1,j-1)*gauss_plate[0][0] + Ix.at<uchar>(i,j-1)*gauss_plate[1][0] + Ix.at<uchar>(i+1,j-1)*gauss_plate[2][0] + Ix.at<uchar>(i-1,j)*gauss_plate[0][1] + Ix.at<uchar>(i,j-1)*gauss_plate[1][1] + Ix.at<uchar>(i+1,j-1)*gauss_plate[2][1] + Ix.at<uchar>(i-1,j+1)*gauss_plate[0][2] + Ix.at<uchar>(i,j+1)*gauss_plate[1][2] + Ix.at<uchar>(i+1,j+1)*gauss_plate[2][2]; } } return g_f; } void my_Harris::GET_RESPONSE(Mat A_, Mat B_, Mat C_, Mat &R) { Mat A = A_.clone(); Mat B = B_.clone(); Mat C = C_.clone(); int rows = A.rows; int cols = B.cols; Mat M_R = Mat(rows, cols, CV_8UC1, Scalar(0)); for(int i = 0; i < rows; i++) { for(int j = 0; j < cols; j++) { float k = 0.15; float a = A.at<uchar>(i,j); float b = B.at<uchar>(i,j); float c = C.at<uchar>(i,j); float r = (a*b-c*c-k*((a+b)*(a+b))); M_R.at<uchar>(i,j) = int(r); if(abs(int(r)) > 48000) { M_R.at<uchar>(i,j) = 255; } else { M_R.at<uchar>(i,j) = 0; }
}
} R = M_R; } void my_Harris::FILTER_THRESH(Mat R, Mat img, Mat &F_R) { Mat img_src = R.clone(); int rows = img_src.rows; int cols = img_src.cols; for(int i = 0; i < rows; i++) { for(int j = 0; j < cols; j++) { if(abs(img_src.at<uchar>(i,j))>254) { img.at<Vec3b>(i,j)[0]=0; img.at<Vec3b>(i,j)[1]=0; img.at<Vec3b>(i,j)[2]=255; } } } imshow("img_src",img); waitKey(0); }
my_harris.h
#ifndef MY_HARRIS_H #define MY_HARRIS_H #include "iostream" #include "opencv2/core.hpp" #include "opencv2/highgui.hpp" using namespace cv; using namespace std; class my_Harris { public: my_Harris(); void RGB2GRAY(Mat rgb_img, Mat &gray_img); void IMG_GRAD(Mat img, Mat &x_grad, Mat &y_grad); void GRAD_MULTI(Mat x_grad, Mat y_grad, Mat &p_x, Mat &p_y, Mat &p_xy); void GAUSS_WEI(Mat p_x, Mat p_y, Mat p_xy, Mat &A, Mat &B, Mat &C); Mat GAUSS_PRO( Mat g); void GET_RESPONSE(Mat A_, Mat B_, Mat C_, Mat &R); void FILTER_THRESH(Mat R, Mat img, Mat &F_R); }; #endif // MY_HARRIS_H
效果图:
实现方法简单,可继续改进!
参考:https://www.cnblogs.com/zyly/p/9508131.html#_label5_0;
原文链接: https://www.cnblogs.com/zhibei/p/12293119.html
欢迎关注
微信关注下方公众号,第一时间获取干货硬货;公众号内回复【pdf】免费获取数百本计算机经典书籍;
也有高质量的技术群,里面有嵌入式、搜广推等BAT大佬

原创文章受到原创版权保护。转载请注明出处:https://www.ccppcoding.com/archives/328308
非原创文章文中已经注明原地址,如有侵权,联系删除
关注公众号【高性能架构探索】,第一时间获取最新文章
转载文章受原作者版权保护。转载请注明原作者出处!