
在本示例中,共设计了三个函数,分别是巴特沃斯滤波器BLPF()、巴特沃斯陷波滤波器notchFilter_BTW()、高斯陷波滤波器notchFilter_GAUSS()
巴特沃斯陷波滤波器参见书上6.4.5选择性滤波器,高斯陷波滤波器参照6.3.3节中的高斯低通滤波器。
参数说明:
rows——滤波器的行数;
cols——滤波器的列数;
D0——频域截止半径;
n——巴特沃斯的阶数;
cvtype——滤波器的数据类型和通道数,默认为双通道浮点数
Mat BLPF(int rows,int cols,float D0,int n=1,int cvtype=CV_32FC2)
{
Mat filt(rows,cols,cvtype,Scalar::all(0));
int cx=cols/2,cy=rows/2;
float D02=D0*D0;
for(int i=0;i<rows;i++)
{
for(int j=0;j<cols;j++)
{
int u=cx-j,v=cy-i;//中心坐标
float Duv2=u*u+v*v;//距离中心半径的平方
float H0=1-1/(1+pow(Duv2/D02,n));
int u1=u-130,v1=v-130;
float D2=u1*u1+v1*v1;
float H1=1-1/(1+pow(D2/D02,n));
//.data返回的是uchar*型指针,所以要强制转换成浮点数型
float* p=(float*)(filt.data+i*filt.step[0]+j*filt.step[1]);
for(int c=0;c<filt.channels();c++)
{
p[c]=H1*H0;
}
}
}
return filt;
}
Mat notchFilter_BTW(int rows,int cols,std::vector<cv::Point> np,
float* D,int n=1,int cvtype=CV_32FC2)
{
Mat filt(rows,cols,cvtype,Scalar::all(0));
int cx=cols/2,cy=rows/2;
int numNotch=np.size();
float* D2=D;
for(int i=0;i<numNotch;i++)
{
D2[i]=D[i]*D[i];
}
int uk[numNotch],vk[numNotch];//在画面上的实际陷波坐标点
int u_k[numNotch],v_k[numNotch];//陷波共轭点
float Dk[numNotch],D_k[numNotch];//陷波半径r
float Hk[numNotch],H_k[numNotch];
for(int i=0;i<rows;i++)
{
for(int j=0;j<cols;j++)
{
int u=cx-j,v=cy-i;//中心坐标
for(int s=0;s<numNotch;s++)
{
uk[s]=u+np[s].x,vk[s]=v+np[s].y;
Dk[s]=uk[s]*uk[s]+vk[s]*vk[s];//距离中心半径的平方
Hk[s]=1-1/(1+pow(Dk[s]/D2[s],n));
u_k[s]=u-np[s].x,v_k[s]=v-np[s].y;
D_k[s]=u_k[s]*u_k[s]+v_k[s]*v_k[s];
H_k[s]=1-1/(1+pow(D_k[s]/D2[s],n));
}
//.data返回的是uchar*型指针,所以要强制转换成浮点数型
float* p=(float*)(filt.data+i*filt.step[0]+j*filt.step[1]);
for(int c=0;c<filt.channels();c++)
{
p[c]=Hk[0]*H_k[0];
for(int k=1;k<numNotch;k++)
{
p[c]*=Hk[k]*H_k[k];
}
}
}
}
return filt;
}
Mat notchFilter_GAUSS(int rows,int cols,std::vector<cv::Point> np,
float* D,int cvtype=CV_32FC2)
{
Mat filt(rows,cols,cvtype,Scalar::all(0));
int cx=cols/2,cy=rows/2;
// float D02=D0*D0;
int numNotch=np.size();
float* D2=D;
for(int i=0;i<numNotch;i++)
{
D2[i]=D[i]*D[i];
}
int uk[numNotch],vk[numNotch];//在画面上的实际陷波坐标点
int u_k[numNotch],v_k[numNotch];//陷波共轭点
float Dk[numNotch],D_k[numNotch];//陷波半径r
float Hk[numNotch],H_k[numNotch];
for(int i=0;i<rows;i++)
{
for(int j=0;j<cols;j++)
{
int u=cx-j,v=cy-i;//中心坐标
for(int s=0;s<numNotch;s++)
{
uk[s]=u+np[s].x,vk[s]=v+np[s].y;
Dk[s]=uk[s]*uk[s]+vk[s]*vk[s];//距离中心半径的平方
Hk[s]=1-exp(-Dk[s]/(D2[s]*2));
u_k[s]=u-np[s].x,v_k[s]=v-np[s].y;
D_k[s]=u_k[s]*u_k[s]+v_k[s]*v_k[s];
H_k[s]=1-exp(-D_k[s]/(D2[s]*2));
}
//.data返回的是uchar*型指针,所以要强制转换成浮点数型
float* p=(float*)(filt.data+i*filt.step[0]+j*filt.step[1]);
for(int c=0;c<filt.channels();c++)
{
p[c]=Hk[0]*H_k[0];
for(int k=1;k<numNotch;k++)
{
p[c]*=Hk[k]*H_k[k];
}
}
}
}
return filt;
}
int main()
{
Point np[]={Point(130,130),Point(90,130),Point(130,100),Point(90,100)};//输入陷波坐标数组
vector<Point> vnp(np,np+4);
float D[4]={5,10,15,20};
// Mat filt1=notchFilter_BTW(500,600,vnp,D,2);
Mat filt1=notchFilter_GAUSS(500,600,vnp,D);
Mat fc1;
extractChannel(filt1,fc1,0);
imshow("filter ",fc1);
waitKey();
return 0;
}
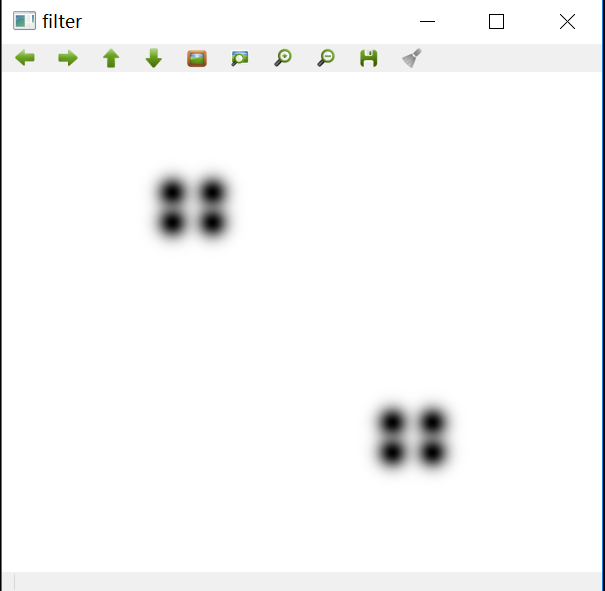
高斯陷波滤波器的演示实例结果如下:

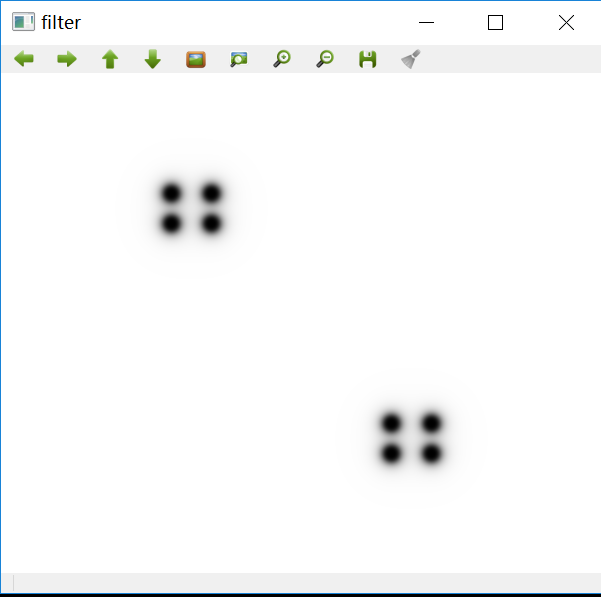
下面是巴特沃斯陷波滤波器的演示结果:
原文链接: https://www.cnblogs.com/phoenixdsg/p/9189793.html
欢迎关注
微信关注下方公众号,第一时间获取干货硬货;公众号内回复【pdf】免费获取数百本计算机经典书籍
原创文章受到原创版权保护。转载请注明出处:https://www.ccppcoding.com/archives/276154
非原创文章文中已经注明原地址,如有侵权,联系删除
关注公众号【高性能架构探索】,第一时间获取最新文章
转载文章受原作者版权保护。转载请注明原作者出处!