
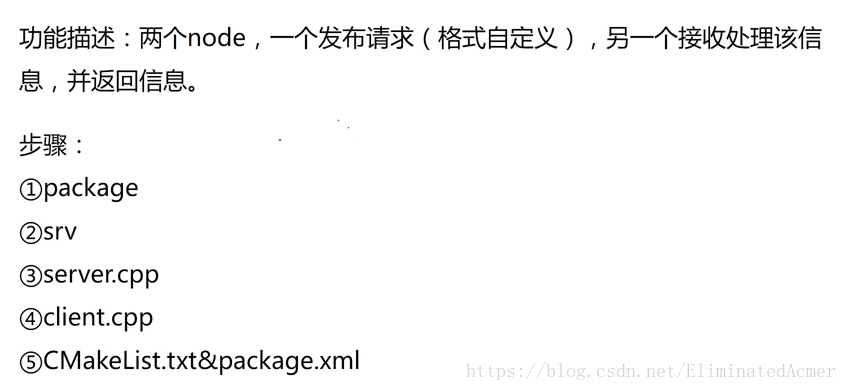
service demo

原理和 topic 通信方式很像 点击打开链接,因此
1.srv :
进入 service_demo 创建 srv 文件夹,创建 Greeting.srv,将以下代码插入:
string name
int32 age
---
string feedback
这个意思是 client 将自己的名称和年龄发给 server,server 会返回一个字符串。
2.server.cpp
进入 src 文件夹,编写 server.cpp
// 加载必要文件,注意Service_demo的加载方式
# include "ros/ros.h"
# include "service_demo/Greeting.h"
# include "string"
// 定义请求处理函数
bool handle_function(service_demo::Greeting::Request &req,
service_demo::Greeting::Response &res)
{
// 此处我们对请求直接输出
ROS_INFO("Request from %s with age %d ", req.name.c_str(), req.age);
// 返回一个反馈,将response设置为"..."
res.feedback = "Hi " + req.name + ". I'm server!";
return true;
}
int main(int argc, char **argv)
{
// 初始化节点,命名为"greetings_server"
ros::init(argc, argv, "greetings_server");
// 定义service的server端,service名称为“greetings”,收到request请求之后>传递给handle_function进行处理
ros::NodeHandle nh;
ros::ServiceServer service = nh.advertiseService("greetings", handle_function);
ros::spin();
return 0;
}
3.client.cpp
# include "ros/ros.h"
# include "service_demo/Greeting.h"
int main(int argc, char **argv)
{
// 初始化,节点命名为"greetings_client"
ros::init(argc, argv, "greetings_client");
// 定义service客户端,service名字为“greetings”,service类型为Service_demo
ros::NodeHandle nh;
ros::ServiceClient client = nh.serviceClient<service_demo::Greeting>("greetings");
// 实例化srv,设置其request消息的内容,这里request包含两个变量,name和age,见Greeting.srv
service_demo::Greeting srv;
srv.request.name = "HAN";
srv.request.age = 20;
if (client.call(srv))
{
// 注意我们的response部分中的内容只包含一个变量response,另,注>意将其转变成字符串
ROS_INFO("Response from server: %s", srv.response.feedback.c_str());
}
else
{
ROS_ERROR("Failed to call service Service_demo");
return 1;
}
return 0;
}
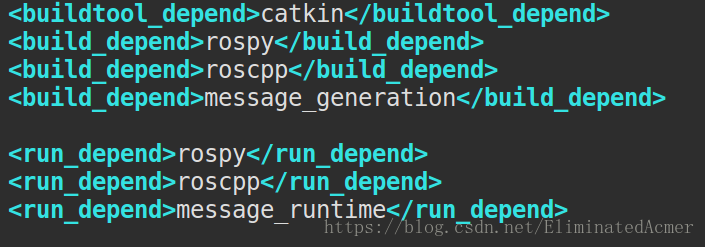
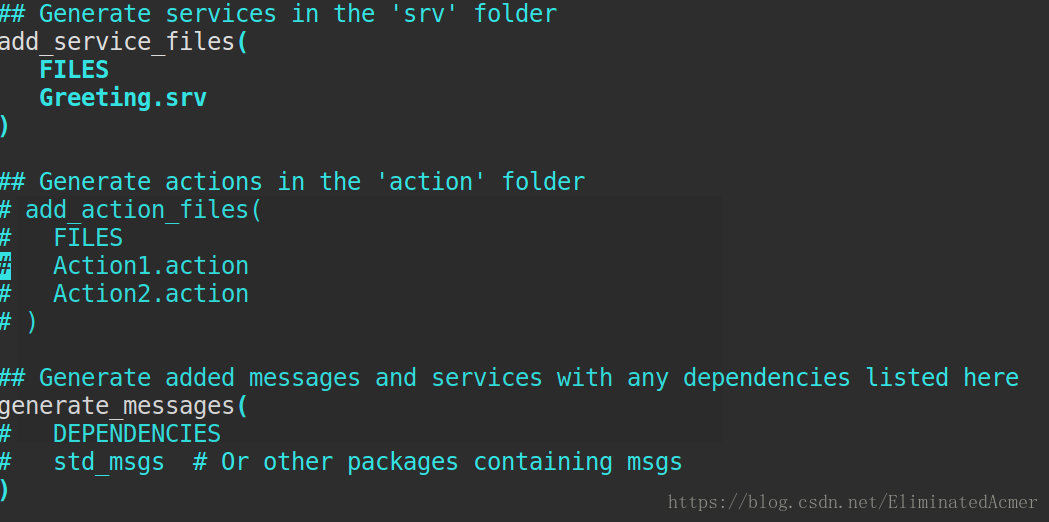
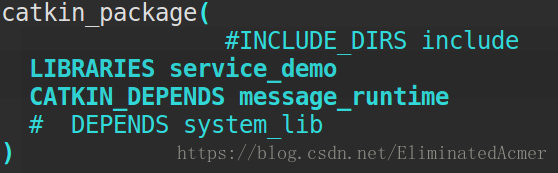
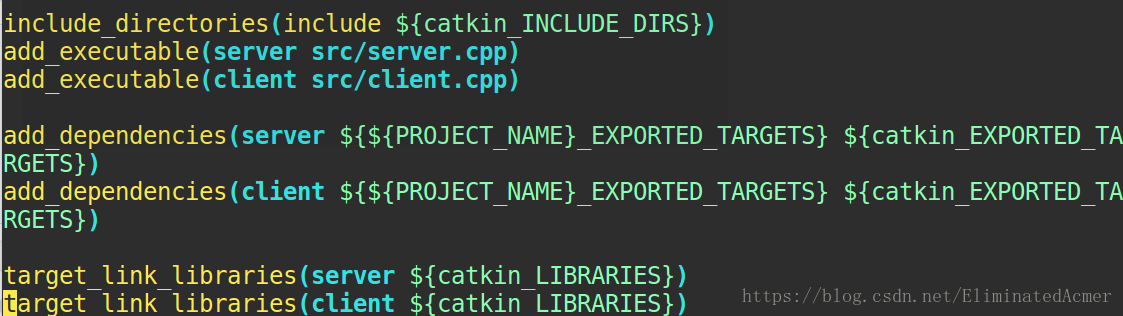
4.CMakeLists.txt & package.xml

5.编译运行
先运行 server ,再运行 client ,结果就不展示了。
原文链接: https://www.cnblogs.com/NikkiNikita/p/9450735.html
欢迎关注
微信关注下方公众号,第一时间获取干货硬货;公众号内回复【pdf】免费获取数百本计算机经典书籍
原创文章受到原创版权保护。转载请注明出处:https://www.ccppcoding.com/archives/275687
非原创文章文中已经注明原地址,如有侵权,联系删除
关注公众号【高性能架构探索】,第一时间获取最新文章
转载文章受原作者版权保护。转载请注明原作者出处!