
一. std::promise和std::package_task
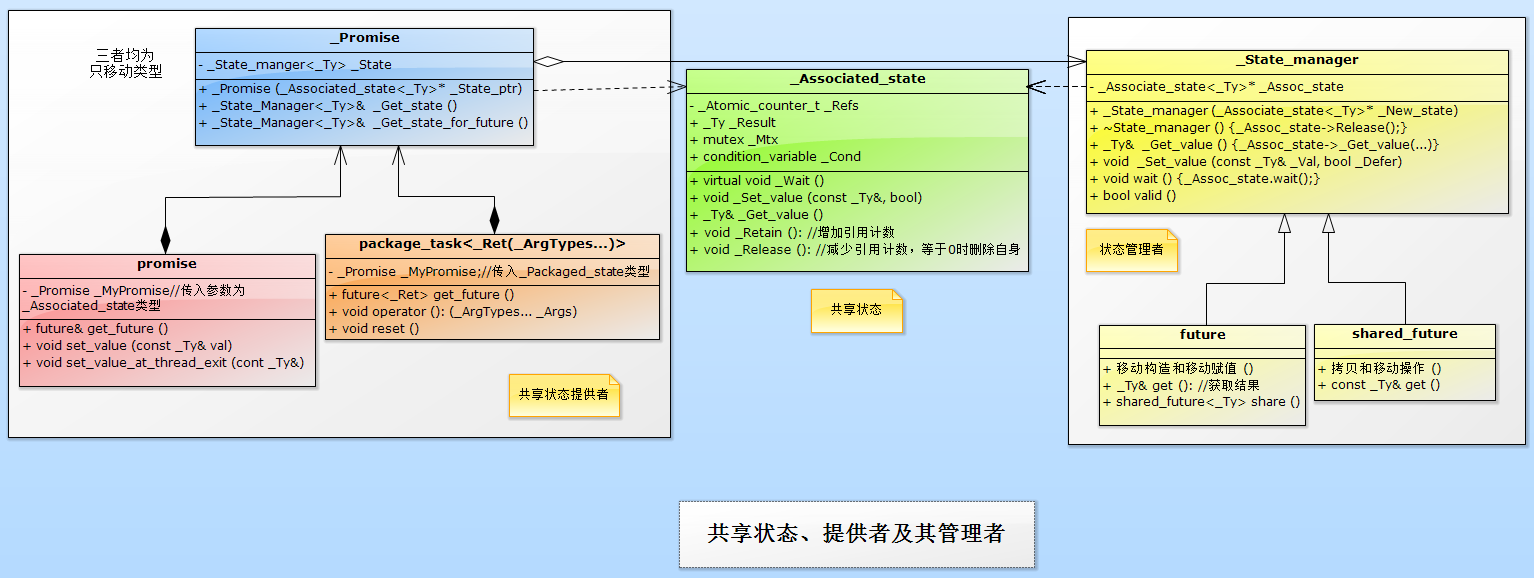
(一)共享状态、提供者和管理者


// CLASS TEMPLATE _Promise template <class _Ty> class _Promise { // class that implements core of promise public: _Promise(_Associated_state<_Ty>* _State_ptr) : _State(_State_ptr, false), _Future_retrieved(false) { // construct from associated asynchronous state object } _Promise(_Promise&& _Other) : _State(_STD move(_Other._State)), _Future_retrieved(_Other._Future_retrieved) { // construct from rvalue _Promise object } _Promise& operator=(_Promise&& _Other) { // assign from rvalue _Promise object _State = _STD move(_Other._State); _Future_retrieved = _Other._Future_retrieved; return *this; } ~_Promise() noexcept { // destroy } void _Swap(_Promise& _Other) { // exchange with _Other _State._Swap(_Other._State); _STD swap(_Future_retrieved, _Other._Future_retrieved); } const _State_manager<_Ty>& _Get_state() const { // return reference to associated asynchronous state object return _State; } _State_manager<_Ty>& _Get_state() { // return reference to associated asynchronous state object return _State; } _State_manager<_Ty>& _Get_state_for_set() { // return reference to associated asynchronous state object, or // throw exception if not valid for setting state if (!_State.valid()) { _Throw_future_error(make_error_code(future_errc::no_state)); } return _State; } _State_manager<_Ty>& _Get_state_for_future() { // return reference to associated asynchronous state object, or // throw exception if not valid for retrieving future if (!_State.valid()) { _Throw_future_error(make_error_code(future_errc::no_state)); } if (_Future_retrieved) { _Throw_future_error(make_error_code(future_errc::future_already_retrieved)); } _Future_retrieved = true; return _State; } bool _Is_valid() const noexcept { // return status return _State.valid(); } bool _Is_ready() const { // return ready status return _State._Is_ready(); } bool _Is_ready_at_thread_exit() const { // return ready at thread exit status return _State._Is_ready_at_thread_exit(); } _Promise(const _Promise&) = delete; _Promise& operator=(const _Promise&) = delete; private: _State_manager<_Ty> _State; bool _Future_retrieved; }; // CLASS TEMPLATE promise template <class _Ty> class promise { // class that defines an asynchronous provider that holds a value public: promise() : _MyPromise(new _Associated_state<_Ty>) { // construct } template <class _Alloc> promise(allocator_arg_t, const _Alloc& _Al) : _MyPromise(_Make_associated_state<_Ty>(_Al)) { // construct with allocator } promise(promise&& _Other) noexcept : _MyPromise(_STD move(_Other._MyPromise)) { // construct from rvalue promise object } promise& operator=(promise&& _Other) noexcept { // assign from rvalue promise object promise(_STD move(_Other)).swap(*this); return *this; } ~promise() noexcept { // destroy if (_MyPromise._Is_valid() && !_MyPromise._Is_ready() && !_MyPromise._Is_ready_at_thread_exit()) { // exception if destroyed before function object returns future_error _Fut(make_error_code(future_errc::broken_promise)); _MyPromise._Get_state()._Set_exception(_STD make_exception_ptr(_Fut), false); } } void swap(promise& _Other) noexcept { // exchange with _Other _MyPromise._Swap(_Other._MyPromise); } _NODISCARD future<_Ty> get_future() { // return a future object that shares the associated // asynchronous state return future<_Ty>(_MyPromise._Get_state_for_future(), _Nil()); } void set_value(const _Ty& _Val) { // store result _MyPromise._Get_state_for_set()._Set_value(_Val, false); } void set_value_at_thread_exit(const _Ty& _Val) { // store result and block until thread exit _MyPromise._Get_state_for_set()._Set_value(_Val, true); } void set_value(_Ty&& _Val) { // store result _MyPromise._Get_state_for_set()._Set_value(_STD forward<_Ty>(_Val), false); } void set_value_at_thread_exit(_Ty&& _Val) { // store result and block until thread exit _MyPromise._Get_state_for_set()._Set_value(_STD forward<_Ty>(_Val), true); } void set_exception(exception_ptr _Exc) { // store result _MyPromise._Get_state_for_set()._Set_exception(_Exc, false); } void set_exception_at_thread_exit(exception_ptr _Exc) { // store result and block until thread exit _MyPromise._Get_state_for_set()._Set_exception(_Exc, true); } promise(const promise&) = delete; promise& operator=(const promise&) = delete; private: _Promise<_Ty> _MyPromise; }; template <class _Ret, class... _ArgTypes> class packaged_task<_Ret(_ArgTypes...)> { // class that defines an asynchronous provider that returns the // result of a call to a function object public: using _Ptype = typename _P_arg_type<_Ret>::type; using _MyPromiseType = _Promise<_Ptype>; using _MyStateManagerType = _State_manager<_Ptype>; using _MyStateType = _Packaged_state<_Ret(_ArgTypes...)>; packaged_task() noexcept : _MyPromise(0) { // construct } template <class _Fty2, class = enable_if_t<!is_same_v<_Remove_cvref_t<_Fty2>, packaged_task>>> explicit packaged_task(_Fty2&& _Fnarg) : _MyPromise(new _MyStateType(_STD forward<_Fty2>(_Fnarg))) { // construct from rvalue function object } packaged_task(packaged_task&& _Other) noexcept : _MyPromise(_STD move(_Other._MyPromise)) { // construct from rvalue packaged_task object } packaged_task& operator=(packaged_task&& _Other) noexcept { // assign from rvalue packaged_task object _MyPromise = _STD move(_Other._MyPromise); return *this; } #if _HAS_FUNCTION_ALLOCATOR_SUPPORT template <class _Fty2, class _Alloc, class = enable_if_t<!is_same_v<_Remove_cvref_t<_Fty2>, packaged_task>>> packaged_task(allocator_arg_t, const _Alloc& _Al, _Fty2&& _Fnarg) : _MyPromise(_Make_packaged_state<_MyStateType>( _STD forward<_Fty2>(_Fnarg), _Al)) { // construct from rvalue function object and allocator } #endif // _HAS_FUNCTION_ALLOCATOR_SUPPORT ~packaged_task() noexcept { // destroy _MyPromise._Get_state()._Abandon(); } void swap(packaged_task& _Other) noexcept { // exchange with _Other _STD swap(_MyPromise, _Other._MyPromise); } _NODISCARD bool valid() const noexcept { // return status return _MyPromise._Is_valid(); } _NODISCARD future<_Ret> get_future() { // return a future object that shares the associated // asynchronous state return future<_Ret>(_MyPromise._Get_state_for_future(), _Nil()); } void operator()(_ArgTypes... _Args) { // call the function object if (_MyPromise._Is_ready()) { _Throw_future_error(make_error_code(future_errc::promise_already_satisfied)); } _MyStateManagerType& _State = _MyPromise._Get_state_for_set(); _MyStateType* _Ptr = static_cast<_MyStateType*>(_State._Ptr()); _Ptr->_Call_immediate(_STD forward<_ArgTypes>(_Args)...); } void make_ready_at_thread_exit(_ArgTypes... _Args) { // call the function object and block until thread exit if (_MyPromise._Is_ready()) { _Throw_future_error(make_error_code(future_errc::promise_already_satisfied)); } _MyStateManagerType& _State = _MyPromise._Get_state_for_set(); if (_State._Ptr()->_Already_has_stored_result()) { _Throw_future_error(make_error_code(future_errc::promise_already_satisfied)); } _MyStateType* _Ptr = static_cast<_MyStateType*>(_State._Ptr()); _Ptr->_Call_deferred(_STD forward<_ArgTypes>(_Args)...); } void reset() { // reset to newly constructed state _MyStateManagerType& _State = _MyPromise._Get_state_for_set(); _MyStateType* _MyState = static_cast<_MyStateType*>(_State._Ptr()); function<_Ret(_ArgTypes...)> _Fnarg = _MyState->_Get_fn(); _MyPromiseType _New_promise(new _MyStateType(_Fnarg)); _MyPromise._Get_state()._Abandon(); _MyPromise._Swap(_New_promise); } packaged_task(const packaged_task&) = delete; packaged_task& operator=(const packaged_task&) = delete; private: _MyPromiseType _MyPromise; };
【std::promise/std::package_task源码摘要】
1.“共享状态”作为异步结果的传输通道,由std::async、std::promise和std::package_task等提供(Provider),并交由future/shared_future管理。Provider将计算结果写入“共享状态”对象,而future/shared_future通过get()函数来读取该结果。
2. std::promise用于包装一个值,将数据和future绑定起来,方便线程赋值。而std::package_task用来包装一个可调用对象,将函数与future绑定以便异步调用。
3. std::async、std::promise和std::package_task都是“共享状态”对象的创建者,它们创建“共享状态”类型有所不同。
(1)std::async:创建_Deferred_async_state和_Task_async_state类型的共享状态。
(2)std::promise:创建_Associated_state类型的“共享状态”。这种类型比较简单,内部只能保存某个类型的值(如返回值)。
(3)std::package_task:创建_Package_state类型的“共享状态”,这种类型内部是通过std::function来可以包装可调用对象的。
4. std::promise和std::package_task都只有移动语义而没有拷贝语义。
(二)std::promise类
1. 用来保存某一类型的值,也可以用来保存线程函数的返回值,该值可被future读取。它为线程同步提供了一种手段。
2. 可以通过 get_future 来获取future 对象,该对象与promise通过“共享状态”这个通道进行异步结果传输。std::promise通常在某个时间点通过设置一个值或异常对象, future通过调用get()来获取这个结果。
3. set_value_at_thread_exit函数:设置共享状态的值,但不会将共享状态的标志设置为ready。当有当线程退出时,该标志位才设置为true,同时唤醒所有阻塞在future的get()函数的线程。
4. 如果销毁std::promise时未设置值,则会存入一个异常。
(三)std::package_task类
1. std::package_task 用来包装可调用对象,其本身也是一个可调用对象(因为重载了operator()(Args…args)函数。它可以作为线程函数传递给std::thread,或传给需要可调用对象的另一个函数,或者干脆直接调用。这与std::function类似,但std::package_task会将其包装的可调用对象执行结果(返回值)保存起来,并传递给了future对象。
2. 通过get_future()返回一个与“共享状态”相关联的future对象。其他线程可以通过std::package_task对象在“共享状态”上设置某个值或者异常。
3. make_ready_at_thread_exit(Arg...args):该函数会调用被包装的任务,并向任务传递参数,类似于std::package_task的operator()成员函数,但不同的是make_read_at_thread_exit并不会立即设置“共享状态”的ready标志,而是在线程退出时才设置它。
4. reset()函数会重置“共享状态”,但是保留了之前被包装的任务。它使得package_task可以被重复使用,这点与std::promise一次性使用不同。
5. std::package_task对象一般与std::thread配合使用,而不是std::async。如果要使用std::async运行任务,就没有理由去创建std::package_task对象。因为std::async调用时,内部会创建一个基类为_Packaged_state类 “共享状态”的子类对象,而std::package_task也会创建_Packaged_state类的对象。可见std::async能够在调用任务执行之前就做到std::package_task能做到的任何事情,也可以避免重复创建“共享状态”对象。
【编程实验】初探std::promise和std::pack_task
#include <iostream> #include <future> #include <thread> #include <chrono> #include <queue> using namespace std; void func(std::promise<int>& pr, int param) { int res = param * 10; pr.set_value_at_thread_exit(res); //线程退出时,设置需要输出的值 } //计算阶乘 int factorial(int n) { std::this_thread::sleep_for(std::chrono::milliseconds(100)); if (n == 1) return 1; return n * factorial(n - 1); } void get_result(std::future<int>& fut) //获取结果 { while (fut.wait_for(std::chrono::milliseconds(20)) == std::future_status::timeout) { std::cout << "."; } std::cout << std::endl; std::cout << "the factorial result is " << fut.get() << std::endl; } int main() { //1. std::promise/std::future配合使用 //1.1 主线程等待子线程的结果 std::promise<int> pr1; std::future<int> fut1 = pr1.get_future(); std::thread t1(func, std::ref(pr1), 5); t1.join(); //等待t1线程退出 std::cout << "The func output: " << fut1.get() << std::endl; //1.2 子线程等待主线程的计算结果 std::promise<int> pr2; std::future<int> fut2 = pr2.get_future(); //创建通道 std::thread t2([](std::future<int>& fut) { int res = fut.get(); cout <<"thread id: "<<std::this_thread::get_id() << " get result " << res << endl; }, std::ref(fut2)); std::this_thread::sleep_for(std::chrono::milliseconds(1500)); pr2.set_value(100); t2.join(); //2. std::package_task与std::future配合使用 //2.1 直接将package_task作为函数对象使用 std::packaged_task<double(int, int)> task1([](int a, int b) { return std::pow(a, b); }); std::future<double> res = task1.get_future(); task1(2, 9); std::cout << "task_lambda: " << res.get() << endl; //2.2 将std::package_task作为任务传递给std::thread线程 std::packaged_task<int(int)> task2(factorial); std::future<int> fut3 = task2.get_future(); std::thread t3(std::ref(task2), 7); //t3线程计算7的阶乘 std::thread t4(get_result, std::ref(fut3)); t3.join(); t4.join(); task2.reset(); //重置task,使得task2可以被重复使用 std::future<int> fut5 = task2.get_future(); std::thread t5(std::ref(task2), 8); //计算8的阶乘 cout << fut5.get() << endl; t5.join(); //3.std::async与std::future配合使用 std::future<int> fut6 = std::async(std::launch::async, factorial, 7); fut6.wait(); cout <<"aync calc result is: " << fut6.get() << endl; return 0; } /*输出结果 The func output: 50 thread id: 6532 get result 100 task_lambda: 512 ................................. the factorial result is 5040 40320 aync calc result is: 5040 */
二. std::promise/std::package_task的应用
(一)一次性事件及建模
1. 一个线程在完成其任务之前,可能需要等待特定的一次性事件的发生。在等待期间,线程可以去轮询事件是否发生,也可以去做其他任务。C++标准库使用std::future为这类一次性事件建模。
2.一旦事件发生,future变为就绪,而std::future的get/wait()只能被调用一次,无法重复使用。如果多线程等待同一个事件,就需要使用std::shared_future,当事件发生时所有相关的shared_future对象均会变为就绪,并且可以访问其关联的任务结果。
3.期值对象本身并不提供同步访问,当多个线程需要访问一个独立的期值对象时,必须使用互斥量或类似同步机制对访问进行保护。而如果仅为了实现一次性的事件通信,基于条件变量的设计会要求多余的互斥量和标志位,这显然不够干净利落,而使用期值可以很好的处理这个问题。
(二)线程间传递任务(以GUI消息处理为例)
1. 在GUI编程中,当一个线程计算完结果,它要发出一条信息给GUI线程,以通知更新界面。
2. std::package_task提供了实现这种功能的方法,且不需要发送一条自定义信息给GUI线程,而是将函数包装成任务,并传递到GUI线程,使任务在GUI线程中运行。
【编程实验】std::promise和std::package_task的应用
#include <iostream> #include <future> #include <thread> #include <mutex> #include <queue> using namespace std; //1.一次性事件及建模(以实现暂停状态启动的线程为例) //创建暂停状态的线程:std::thread类创建的线程,一启动线程就运行起来。但是如果希望在线程运行前设置优先级和内核亲和性, //就需要一个可以创建一个暂停的线程,然后通过其提供的native_handle成员,利用平台底层API配置这些线程特征。为达到这一 //目的,可以利用std::promise / std::future提供的一次性机制来实现暂停状态的线程。 class MyThread { private: std::thread mThread; std::promise<void> mPromise; std::future<void> mFuture; bool bStart; public: template<typename Fn, typename ...ArgTypes> MyThread(Fn&& fn, ArgTypes&&... args):bStart(false) { mFuture = mPromise.get_future(); mThread = std::move(std::thread([this, &fn, &args...] { mFuture.wait(); std::forward<Fn>(fn)(std::forward<ArgTypes>(args)...); })); } void start() { if (!bStart) { mPromise.set_value(); bStart = true; } } void join() { mThread.join(); } void detach() { mThread.detach(); } bool joinable() { return mThread.joinable(); } }; //2. 利用shared_future处理多个反应任务 //反应任务 std::mutex g_mtx; void reach() { std::lock_guard<std::mutex> lck(g_mtx); cout << "thread(id= " <<std::this_thread::get_id() <<") react"<< endl; } //检测任务(可处理多个反应任务) void detech() { std::promise<void> pr; std::shared_future<void> sf = pr.get_future().share(); std::vector<std::thread> vec; //反应任务的容器 for (int i = 0; i < 10; ++i) { vec.emplace_back([sf] //在sf按值传递,在其副本上wait { sf.wait(); reach(); }); } //... //注意,如果此处抛出异常,则detech会失去响应 pr.set_value(); //让所有线程取消暂停 for (auto& t : vec) { t.join(); } } //3. gui消息处理(在线程间传递任务,而不是消息) class MessageManager { std::queue<std::shared_ptr<std::function<void()>>> mQueue; std::mutex mtx; bool bShutdown = false; public: void shutDown() { bShutdown = true; } //将任务包装成package_task template<typename Fn, typename... Args> std::future<std::result_of_t<Fn && (Args&& ...)>> //postTask函数的返回值类型,future配合package_task使用 postTask(Fn&& fn, Args&& ...args) { using Ret = std::result_of_t <Fn && (Args && ...)>; //Fn函数的返回值类型 std::lock_guard<std::mutex> lck(mtx); ////将任务包装成package_task类型(注意,由于package_task为只移动类型,不能复制。这里在堆上创建) auto ptrPA = std::make_shared<std::packaged_task<Ret()>>(std::bind(std::forward<Fn>(fn), std::forward<Args>(args)...)); auto fut = ptrPA->get_future(); //利用lambda将“std::packaged_task<Ret()>”重新包装成queue队列所需的元素类型:std::function<void()>共享指针类型 auto pTask = std::make_shared<std::function<void()>>([ptrPA]()->void {(*ptrPA)(); }); mQueue.push(pTask); return fut; } void guiThread() { while (!bShutdown) { //... //处理其它gui界面消息 //获取并执行用户任务 std::shared_ptr<std::function<void()>> task; { std::lock_guard<std::mutex> lk(mtx); if (mQueue.empty()) continue; task = mQueue.front(); //取出队列中的用户任务 mQueue.pop(); } (*task)(); //执行任务 } } }; int main() { cout << "main thread running..." << endl; //1. 以暂停状态启动的线程 MyThread th([](int x, int y) { int res = x + y; cout << x << " + " << y << " = " << res << endl; return res; }, 10, 20); th.start(); th.join(); //2.处理多反应任务(在shared_future上等待) detech(); //3. 在线程间传递任务 MessageManager mm; std::thread guiThread(&MessageManager::guiThread,&mm); auto fut1 = mm.postTask([](int x, int y)->int { return x + y; }, 1, 2); auto fut2 = mm.postTask([](int x, int y, int z) {return x * y * z; }, 10, 20, 30); auto fut3 = mm.postTask([](const std::string& str) {return str; }, "SantaClaus"); cout << fut1.get() << endl; //3 cout << fut2.get() << endl; //6000 cout << fut3.get() << endl; //SantaClaus mm.shutDown(); guiThread.join(); return 0; } /*输出结果 main thread running... 10 + 20 = 30 thread(id= 8792) react thread(id= 2600) react thread(id= 2604) react thread(id= 13384) react thread(id= 14864) react thread(id= 14884) react thread(id= 13588) react thread(id= 13516) react thread(id= 11956) react thread(id= 13540) react 3 6000 SantaClaus */
原文链接: https://www.cnblogs.com/5iedu/p/11815582.html
欢迎关注
微信关注下方公众号,第一时间获取干货硬货;公众号内回复【pdf】免费获取数百本计算机经典书籍;
也有高质量的技术群,里面有嵌入式、搜广推等BAT大佬

原创文章受到原创版权保护。转载请注明出处:https://www.ccppcoding.com/archives/392677
非原创文章文中已经注明原地址,如有侵权,联系删除
关注公众号【高性能架构探索】,第一时间获取最新文章
转载文章受原作者版权保护。转载请注明原作者出处!